

MISSION

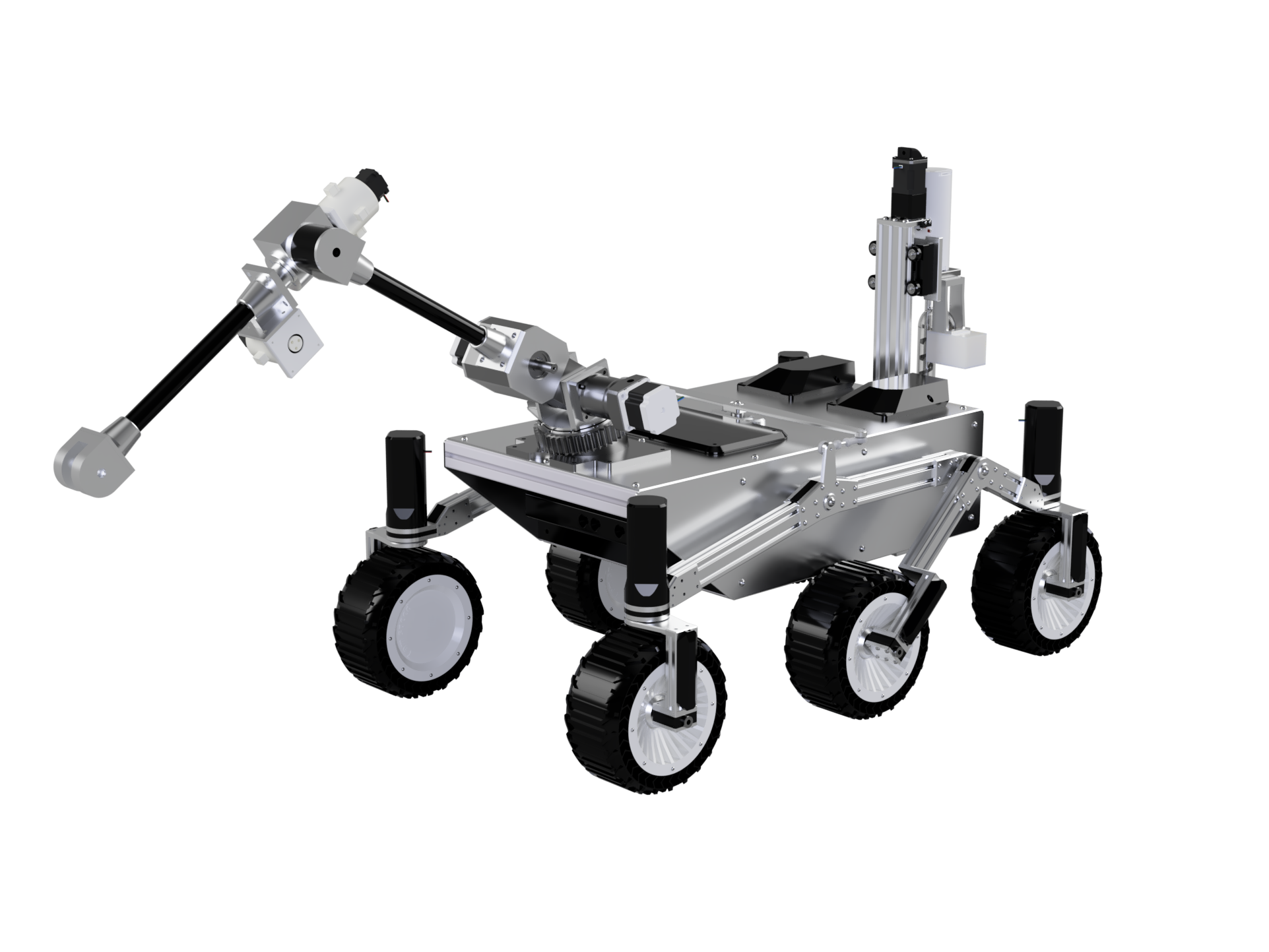
SCORPIUS (based on the similarity from a scorpion’s tail and a robotic arm on our rover) will be the first Rover-Project of STA. We aim to compete in the ERC (European Rover Challenge) in September 2024 in Kielce, Poland, where students from all over the world participate. Our project is -mainly- following NASA’s review process: until the end of WS23, our project will undergo a “PDR” (preliminary design review), a “CDR” (critical design review) and a readiness review. Eventually we are going to test our rover on a Mars-imitating testbed, where it will undergo the ERC’s challenges and tasks.
The rover itself shall be a standalone, mobile platform, weighing no more than 75 kg and be capable of operating in manual mode as well as in full-autonomous mode. Additionally, our rover will have to operate in moderate to harsh weather conditions and tough hills and terrains.